Yuhang Ming (明煜航)
Slow is smooth, smooth is fast.

Hangzhou, China, 310018
I am a Lecturer at the School of Computer Science, Hangzhou Dianzi University, and a Postdoctoral Researcher at the School of Artificial Intelligence, Shanghai Jiao Tong University, supervised by Prof. Cewu Lu. I lead the Spatial Intelligence and Interaction Group (SIIG) under Zhejiang Provincial Key Laboratory of BCCITA and Institute of Cognitive Computing and Intelligent Interaction. My research interests cover SLAM, localization, 3D reconstruciton, scene representation, etc.
I was previously a Ph.D. student at the Visual Information Laboratory, University of Bristol, supervised by Prof. Andrew Calway and a visiting Ph.D. student at the State Key Lab of CAD&CG, Zhejiang University, supervised by Prof. Guofeng Zhang. Before that, I received my M.S. degree from University of California, San Diego, B.S. from University of Missouri - Columbia and B.Eng. from University of Electronic Science and Technology of China.
news
| Dec 30, 2025 | I am pleased to announce that I now serve as deputy director of Institute of Cognitive Computing and Intelligent Interaction at School of Computer Science, Hangzhou Dianzi University. |
|---|---|
| Dec 1, 2025 | Starting in December 2025, I will begin my postdoctoral research journey at School of Artificial Intelligence, Shanghai Jiao Tong University under the supervision of Prof. Cewu Lu. |
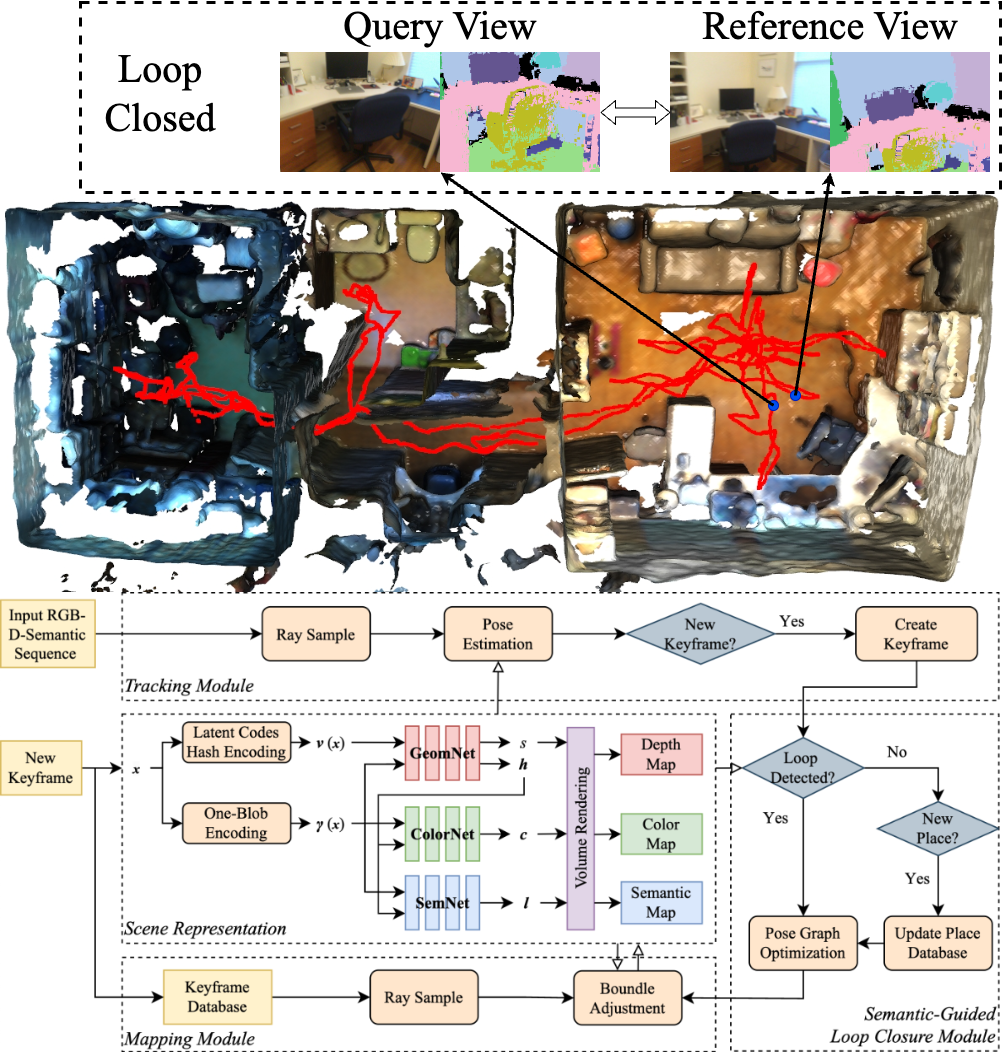
| Mar 16, 2025 | New paper on NeRF SLAM is accepted to IEEE Robotics and Automation Letters. SLC$^2$-SLAM: Semantic-guided Loop Closure using Shared Latent Code for NeRF SLAM. |
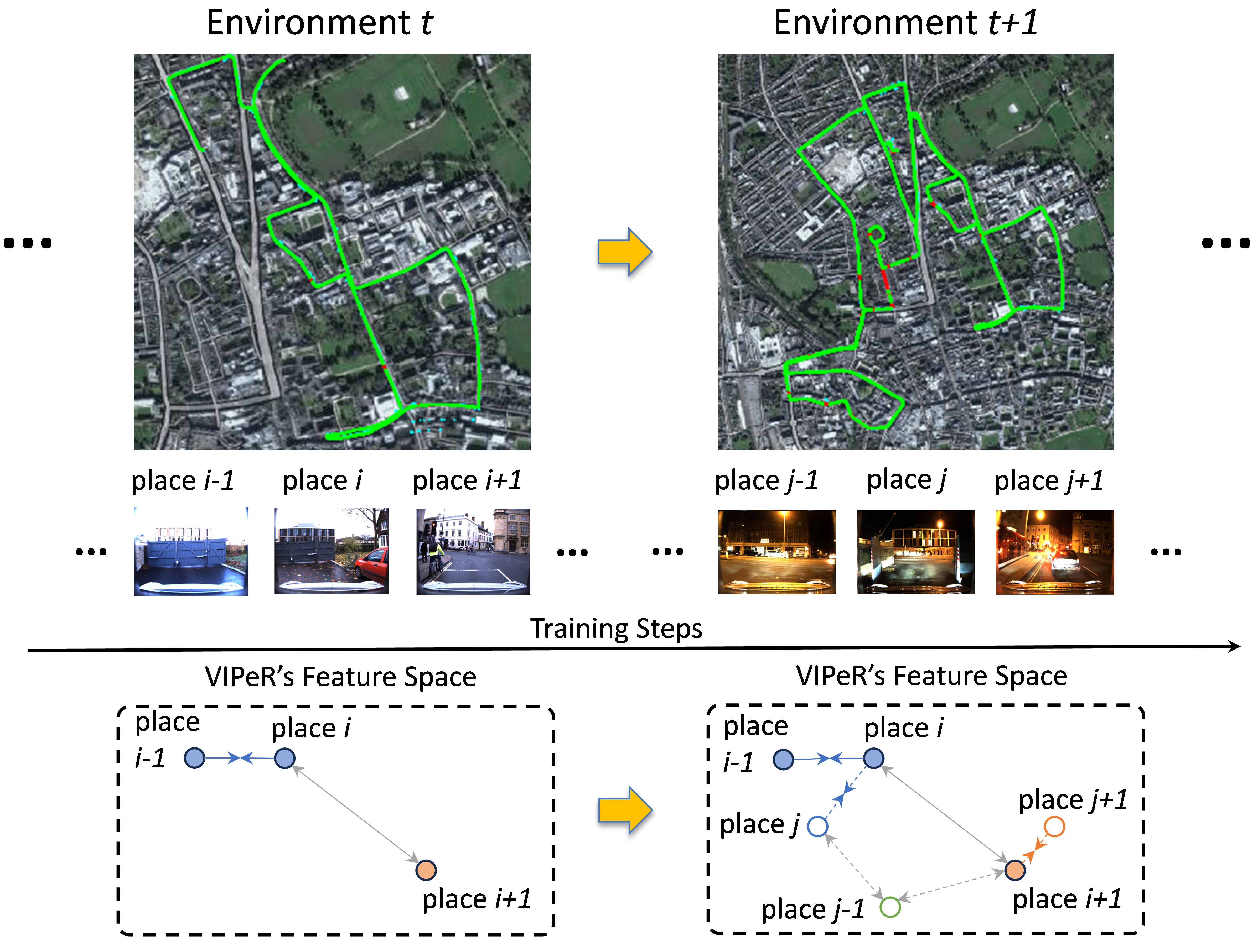
| Jan 10, 2025 | New paper on incremental place recognition is accepted to IEEE Robotics and Automation Letters. VIPeR: Visual Incremental Place Recognition with Adaptive Mining and Continual Learning. |
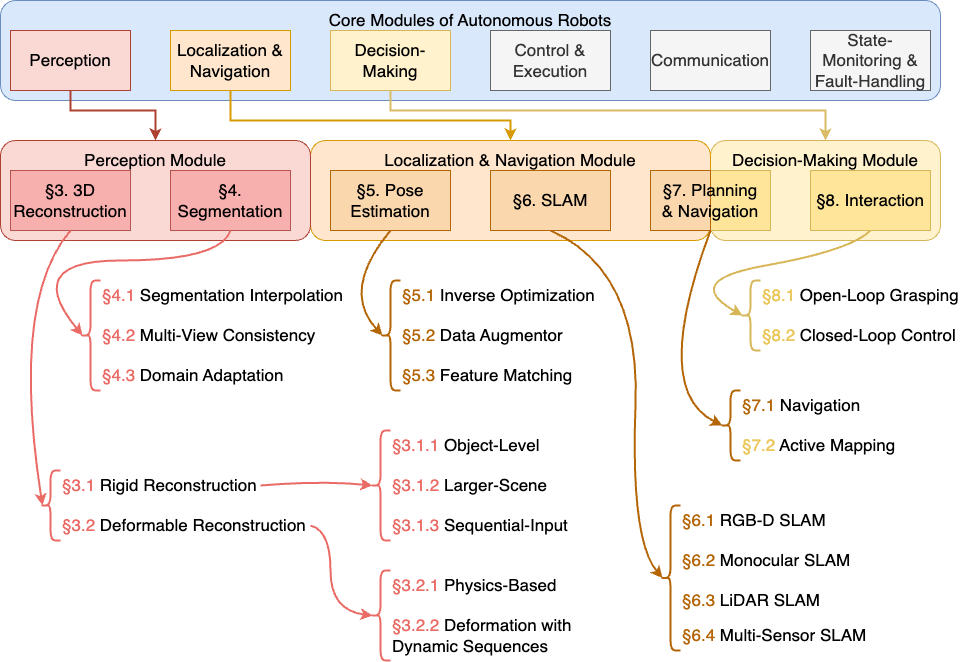
| Nov 29, 2024 | New survey paper on NeRF applications in autonomous robots accepted to Engineering Applications of Artificial Intelligence. Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview. Free access to our paper is available untill Jan. 15, 2025 via link. |
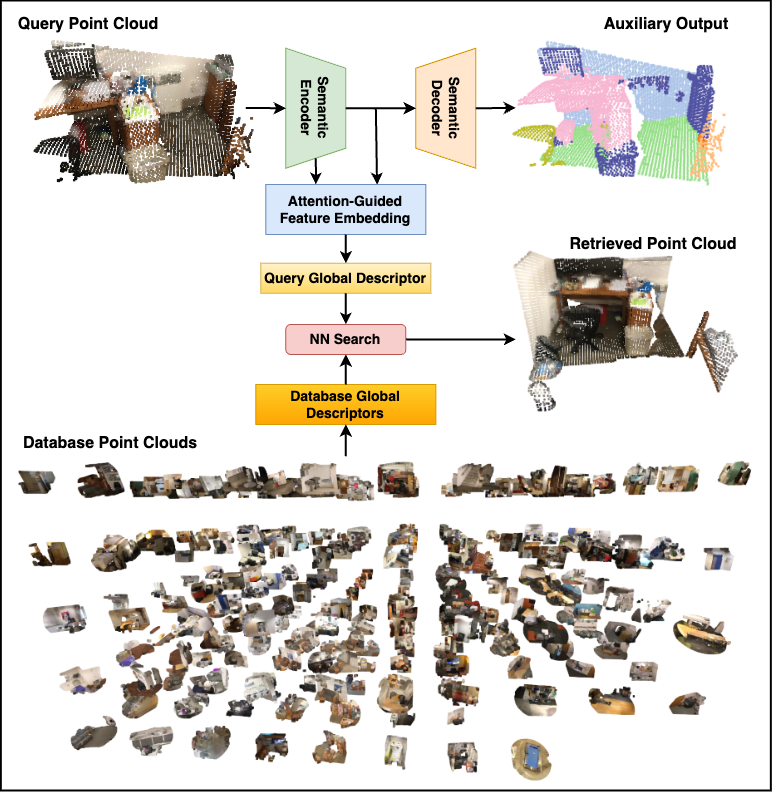
| Apr 18, 2024 | New paper on indoor place recognition presented at ICASSP 2024. AEGIS-Net: Attention-guided Multi-Level Feature Aggregation for Indoor Place Recognition, arxiv, poster. |
| Nov 30, 2023 | First prize winner of 2023 Zhijiang Cup - Data Data Governance and Innovative Utilization Competition, in collaboration with Hangzhou Emergency Medical Center and Hangzhou Antigravity Intelligent Technology Co Ltd. 2023“之江杯”数据治理与创新利用大赛——数据开放利用赛道一等奖。中文ppt. |
| Oct 2, 2023 | New paper on visual-inertial initialization presented at IROS 2023. EDI: ESKF-based Disjoint Initialization for Visual-Inertial SLAM Systems, arxiv, slides. |
| Jun 22, 2023 | Paper presented at CVPR 2023. poster. |
| May 29, 2023 | Talk given at the Annual Meeting of Zhejiang Medical Doctors Association. 2023年浙江省医师协会院前急救医师分会年会专题讲座《医疗急救无人机的应用探索》。中文PPT. |
| Mar 1, 2023 | I’m pleased to share that I will be joining Hangzhou Dianzi University as a Lecturer in March 2023. |
| Jan 23, 2023 | Ph.D. thesis is available at Enhancing RGB-D SLAM Using Deep Learning. |
| Jan 2, 2023 | New website online. |
| Dec 19, 2022 | Passed Ph.D. viva with minor corrections |
services
Journal Reivewer: IEEE TPAMI, IEEE TIP, IEEE TCSVT, IEEE RA-L.
Conference Reviewer: IEEE ICRA (2026), IEEE/RSJ IROS (2025, 2024, 2023), IEEE/CVF CVPR (2025), BMVC (2025, 2024, 2023, 2022, 2019), ACM MM (2024).